Listen to this text  |
SwRI Workbench for Offline Robotics Development permits manufacturing engineers to independently use complicated robotics and simplifies movement planning for seasoned builders. Source: Southwest Research Institute
An trade push for extra automation is advancing the Robot Operating System, or ROS, past the tutorial and manufacturing domains into agriculture, automotive, retail, healthcare and extra. Various forecasts venture that the open-source superior robotics market will develop greater than 10% yearly between 2024 and 2029.
These developments are motivating for robotics engineers at Southwest Research Institute (SwRI) and our colleagues on the ROS-Industrial Consortium and supporting industries. We additionally acknowledge that the usability of robotics software program continues to be an obstacle to even increased ranges of adoption.
Over the years, the ROS-I Consortium has held frequent roadmapping classes with all kinds of finish customers and ROS builders to deal with ease of use and persevering with training. The recognized want is a decrease barrier of entry for non-programmers (or entry-level builders) to harness the facility of instruments within the ROS ecosystem, however in a method that aligns with trade adoption of digital thread and Industry 4.0 methods.
The conventional ROS workflow is software program programming-intense, requiring builders deeply conversant in obtainable ROS libraries and instruments. Even skilled builders throughout the ROS-I ecosystem and past could spend important time — days to weeks — on the preliminary setup and configuration of a ROS software.
Listening to the voice of our personal builders, our various stakeholders, and consortium members, we heard the necessity for simpler entry to the ROS motion-planning instruments, whereas sustaining a tie again to the CAD ecosystem the place the merchandise to be labored on are conceived and maintained.
 Learn from Agility Robotics, Amazon, Disney, Teradyne and plenty of extra.
Learn from Agility Robotics, Amazon, Disney, Teradyne and plenty of extra.
SWORD is a graphical toolkit for robotics builders
The Southwest Research Institute is launching the SwRI Workbench for Offline Robotics Development (SWORD) that includes a graphical toolkit for growing and testing superior robotic motion-planning functions.
SWORD is applied as a plugin to the open-source FreeCAD software, permitting customers to combine robotics capabilities right into a cross-platform CAD surroundings. It gives a graphical interface to many highly effective motion-planning libraries.
The objective is to convey ROS to a producing/industrial viewers in a method that’s extra approachable and resides in an surroundings that’s acquainted. Most manufacturing engineers are competent with CAD and perceive their processes, typically doing numerous types of packages on process-oriented techniques.
SWORD seeks to convey superior motion-planning functionality to this viewers enabling to arrange their techniques and make the most of these extra superior instruments of their operational environments. Through the primary Beta take a look at, the workforce at SwRI has collected suggestions from finish customers and is nearing the discharge the primary model of SWORD. SWORD at present presents the capabilities under:
Environment modeling

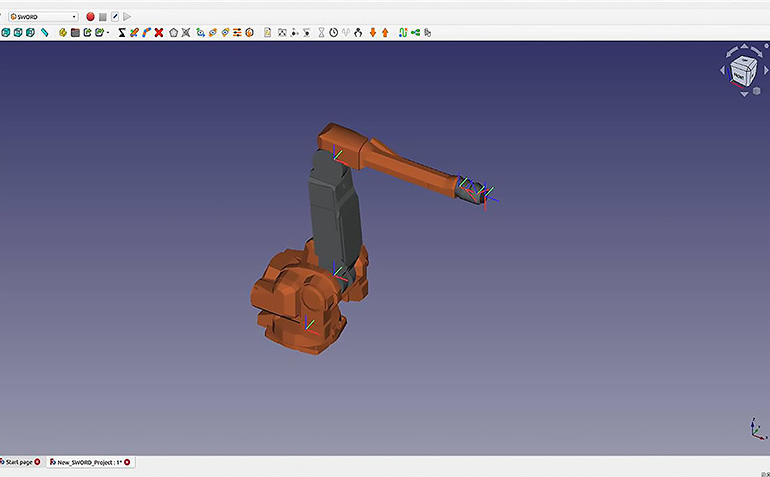
Figure 1: An instance of URDF creation and analysis in SWORD. Click right here to enlarge. Source: Southwest Research Institute
Command language
Specify completely different transfer phase varieties (joint/cartesian) and movement teams
Insert supplementary instructions (I/O, delays, and so forth.)
Motion planning
Create customized planning pipelines for application-specific habits; see Figure 2 under.
Compute the Allowed Collision Matrix
Review computed movement trajectory
SWORD is formally launched, and seats can be found. You can request a trial model to grasp whether it is proper on your group. If you have an interest in a trial license, or wish to study extra or get a guided tour from SwRI, please contact Jeremy Zoss or Matt Robinson.

Figure 2: Setting up a movement planning pipeline for testing and analysis in SWORD. Click right here to enlarge. Source: Southwest Research Institute
 About the writer and the Southwest Research Institute
About the writer and the Southwest Research Institute
Matthew Robinson is program supervisor for ROS-Industrial Consortium Americas on the Southwest Research Institute. He was beforehand analysis workforce chief and a graduate fellow on the Edison Welding Institute. Robinson has participated in RoboBusiness Direct and has an M.S.W.E. from The Ohio State University.
Since 1947, the nonprofit SwRI in San Antonio, Texas, has taken a multidisciplinary method to analysis and improvement for presidency and trade shoppers.