
When Figure introduced earlier this yr that it was engaged on a basic goal humanoid robotic, our pleasure was tempered considerably by the truth that the corporate didn’t have a lot to point out apart from renders of the robotic that it hoped to ultimately construct. Figure had a slick trying imaginative and prescient, however with out something to again it up (apart from a world-class robotics workforce, in fact), it was unclear how briskly they’d have the ability to progress.
As it seems, they’ve progressed fairly darn quick, and right now Figure is unveiling its Figure 01 robotic, which has gone from nothing in any respect to dynamic strolling in underneath a yr.
A few issues to notice concerning the video, when you tear your eyes away from that shiny metallic pores and skin and the big battery backpack: first, the robotic is strolling dynamically and not using a tether and there are not any nervous-looking roboticists inside simple grabbing distance. Impressive! Dynamic strolling signifies that there are factors throughout the robotic’s gait cycle the place abruptly stopping would trigger the robotic to fall over, because it’s relying on momentum to maintain itself in movement. It’s the form of strolling that people do, and is considerably harder than a extra conventional “robotic” stroll, by which a robotic makes positive that its middle of mass is all the time safely positioned above a strong floor contact. Dynamic strolling can also be the place these mild arm swings come from—they’re serving to preserve the robotic’s movement clean and balanced, once more in a human-like manner.
The second factor that stands out is how skinny (and glossy!) this robotic is, particularly in case you can look previous the cable routing. Figure had initially proven renderings of a robotic with the shape issue of a slim human, however there’s normally a fairly large distinction between an preliminary fancy render and actual {hardware} that reveals up months later. It now seems to be like Figure truly has a shot at protecting to that slim design, which has a number of advantages—there are human-robot interplay issues, the place a smaller type issue is prone to be much less intimidating, however extra importantly, the mass you save by slimming down as a lot as doable results in a robotic that’s extra environment friendly, cheaper, and safer.
Obviously, there’s much more occurring right here than Figure may squeeze into is press launch, so for extra particulars, we spoke with Jenna Reher, a Senior Robotics/AI Engineer at Figure, and Jerry Pratt, Figure’s CTO.
What was the method like so that you can educate this robotic methods to stroll? How troublesome was it to do this in a yr?
Jenna Reher: We’ve been actually centered on ensuring that we’re validating a whole lot of the {hardware} because it’s constructed. With the robotic that’s proven within the video, earlier this yr it was simply the pelvis bolted onto a take a look at fixture. Then we added the backbone joints and all of the joints linked to that pelvis, and actually constructed the robotic out from that pelvis. We added the legs and had these swinging within the air, after which constructed up the torso on prime of that. At every of these phases, we had been ensuring to have a very good course of for validating that these low degree items of this general system had been very well tuned in. I feel that when you get to one thing as complicated as an entire humanoid, all that validation actually saves you a whole lot of time on the opposite finish, since you’ve gotten much more confidence within the decrease degree techniques as you begin engaged on increased degree behaviors like locomotion
We even have lots of people on the firm which have expertise on prior legged robotic platforms, so there’s a nicely of data that we are able to draw from there. And there’s a big pool of literature that’s been revealed by individuals within the locomotion neighborhood that roboticists can now pull from. With our locomotion controller, it’s not like we’re attempting to reinvent secure locomotion, so having the ability to implement issues that we all know already work is a giant assist.
Jerry Pratt: The strolling algorithm we’re utilizing has a whole lot of similarities to those that had been developed throughout the DARPA Robotics Challenge. We’re doing a whole lot of machine studying on the notion facet, however we’re not likely doing any machine studying for management proper now. For the strolling algorithm, it’s just about robotics controllers 101.
And Jenna talked about the step-by-step {hardware} bring-up. While that’s occurring, we’re doing a whole lot of improvement on the controller in simulation to get to the purpose the place the robotic is strolling in simulation fairly nicely, which signifies that we’ve got a very good likelihood of the controller engaged on the actual robotic as soon as it comes on-line. I feel as an organization, we’ve completed a very good job coordinating all of the items, and a whole lot of that has come from having individuals with the expertise of getting completed this a number of instances earlier than.
More broadly, eight years after the DARPA Robotics Challenge, how arduous is it to get a human-sized bipedal robotic to stroll?
Pratt: Theoretically, we perceive strolling fairly nicely now. There are a whole lot of totally different easy fashions, totally different toolboxes which are obtainable, and a couple of dozen totally different approaches that you could take. A variety of it depends upon having good {hardware}—it may be actually troublesome in case you don’t have that. But for okay-ish strolling on flat floor, it’s turn into simpler and simpler now with all the prior work that’s been completed.
There are nonetheless a whole lot of challenges for strolling naturally, although. We actually wish to get to the purpose the place our robotic seems to be like a human when it walks. There are some robots which have gotten shut, however none that I might say have handed the Turing take a look at for strolling, the place in case you checked out a silhouette of it, you’d suppose it was a human. Although, there’s not a very good enterprise case for doing that, besides that it needs to be extra environment friendly.
Jenna: Walking is turning into increasingly more understood, and likewise accessible to roboticists when you’ve got the {hardware} for it, however there are nonetheless a whole lot of challenges to have the ability to stroll whereas doing one thing helpful on the identical time—interacting together with your surroundings whereas shifting, manipulating issues whereas shifting—these are nonetheless difficult issues.
What are some vital issues to search for once you see a bipedal robotic stroll to get a way of how succesful it may be?
Reher: I feel we as people have fairly good instinct for judging how nicely one thing is locomoting—we’re form of hardwired to do it. So in case you see buzzing oscillations, or a really stiff higher physique, these could also be indications {that a} robotic’s low-level controls will not be fairly there. A variety of success in bipedal strolling comes down to creating positive {that a} very complicated techniques engineering structure is all taking part in good collectively.
Pratt: There have been some current efforts to give you efficiency metrics for strolling. Some are form of apparent, like strolling pace. Some are more durable to measure, like robustness to disturbances, as a result of it issues what section of gait the robotic is at when it will get pushed—in case you push it at simply the precise time, it’s a lot more durable for it to get well. But I feel the particular person pushing the robotic take a look at is a reasonably good one. While we haven’t completed pushes but, we in all probability will in an upcoming video.
How vital is it in your robotic to have the ability to fall safely, and at what level do you begin designing for that?
Pratt: I feel it’s important to fall safely, to outlive a fall, and have the ability to get again up. People fall— not fairly often, however they do— and so they get again up. And there might be instances in nearly any software the place the robotic falls for one cause or one other and we’re going to have to only settle for that. I usually inform individuals engaged on humanoids to construct in a fall habits. If the robotic’s not falling, make it fall! Because in case you’re attempting to make the robotic in order that it will probably by no means fall, it’s simply too arduous of an issue, and it’s going to fall anyway, after which it’ll be harmful.
I feel falling may be completed safely. As lengthy as computer systems are nonetheless answerable for the {hardware}, you are able to do very swish, judo-style falls. You ought to have the ability to detect the place individuals are in case you are falling, and fall away from them. So, I feel we are able to make these robots comparatively protected. The hardest a part of falling, I feel, is defending your fingers so that they don’t break as you’re falling. But it’s undoubtedly not an insurmountable drawback.
 Industrial design is a spotlight of Figure.Figure
Industrial design is a spotlight of Figure.Figure
You have a really slim and glossy robotic. Did the design require any engineering compromises?
Pratt: It’s truly a very wholesome collaboration. We’re attempting to suit inside a medium-size feminine physique form, and so the commercial design workforce will make these actually modern trying robotic silhouettes and say, “okay mechanical workforce, the whole lot wants to slot in there.” And the mechanical workforce might be like, “we are able to’t match that motor in, we’d like a pair extra millimeters.” It’s form of enjoyable watching the discussions, and typically there might be arguments and stuff, however it nearly all the time results in a greater design. Even if it’s just because it causes us to have a look at the issue a few further instances.
Reher: From my perspective, the form of interplay with the mechanical engineers that led to the robotic that we’ve got now has been very useful for the controls facet. We have a sleeker design with decrease inertia legs, which signifies that we’re not attempting to maneuver a whole lot of mass round. That finally ends up serving to us down the road for designing management algorithms that we are able to execute on the {hardware}.
Pratt: That’s proper. And protecting the legs slim means that you can do issues like crossover steps—you get extra vary of movement since you don’t have components of the robotic bumping into one another. Self-collisions are one thing that you just all the time have to fret about with a robotic, so in case your robotic has fewer protruding cables or bumps, it’s fairly vital.
Your CEO posted an image of some compact customized actuators that your robotic is utilizing. Do you are feeling like your actuator design (or one thing else) offers your robotic some form of secret sauce that can assist or not it’s profitable?
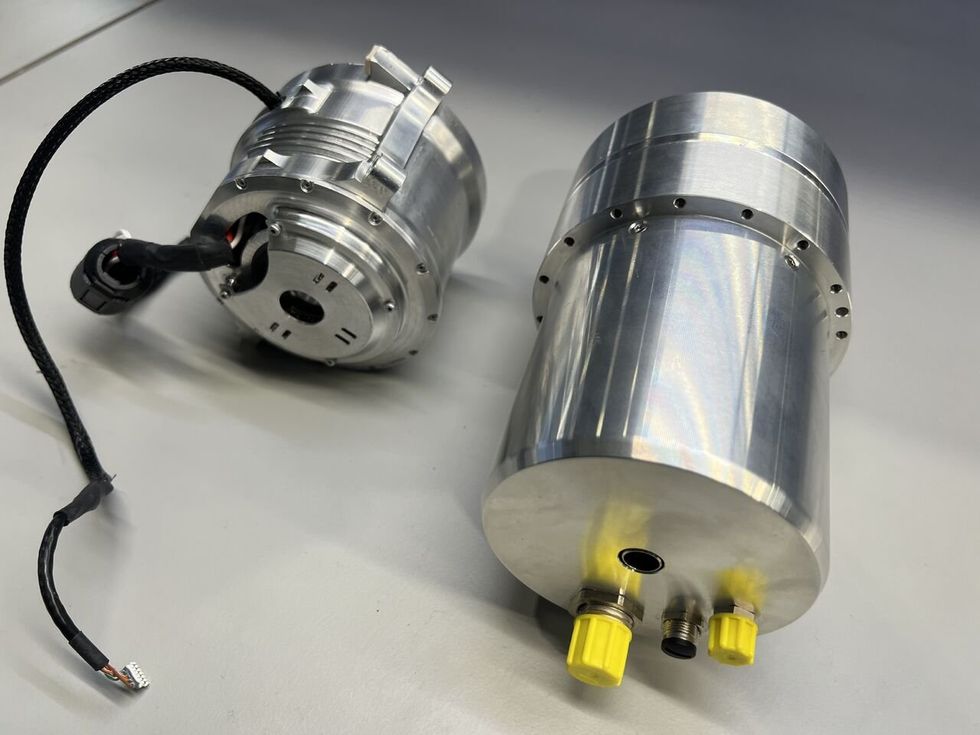 Figure’s customized actuator (left) vs. off-the-shelf actuator (proper) with equal torque.Figure
Figure’s customized actuator (left) vs. off-the-shelf actuator (proper) with equal torque.Figure
Pratt: At this level, it’s principally actually wonderful engineering and software program improvement and tremendous gifted individuals. About half of our workforce have labored on humanoids earlier than, and half of our workforce have labored in some associated discipline. That’s vital— issues like, making batteries for automobiles, making electrical motors for automobiles, software program and administration techniques for electrical airplanes. There are some things we’ve realized alongside the best way that we hadn’t realized earlier than. Maybe they’re not tremendous secret issues that different individuals don’t know, however there’s a handful of tips that we’ve picked up from bashing our heads towards some drawback again and again. But there’s not a whole lot of new know-how going into the robotic, let’s put it that manner.
Are there alternatives within the humanoid robotic area for somebody to develop a brand new know-how that may considerably change the business?
Pratt: I feel attending to no matter it takes to open up new software areas, and do it comparatively shortly. We’re keen on issues like utilizing giant language fashions to plan basic goal duties, however they’re not fairly there but. A variety of the examples that you just see are on the research-y stage the place they could work till you alter up what’s occurring—it’s not sturdy. But if somebody cracks that open, that’s an enormous benefit.
And then hand designs. If any person can give you a brilliant sturdy giant diploma of freedom hand that has drive sensing and tactile sensing on it, that may be enormous too.
 The robotic is designed to suit inside a medium-size feminine physique form.Figure
The robotic is designed to suit inside a medium-size feminine physique form.Figure
This is a whole lot of progress from Figure in a really quick time, however they’re actually not alone of their aim of creating a industrial bipedal robotic, and relative to different corporations who’ve had operational {hardware} for longer, Figure might have some catching as much as do. Or they might not—till we begin seeing robots doing sensible duties exterior of fastidiously managed environments, it’s arduous to know for positive.
From Your Site Articles
Related Articles Around the Web